
HOME / POSTS / SAMPLING-BASED MPC FOR CONTACT-RICH MANIPULATION
Sampling-Based MPC for Contact-Rich Manipulation
October 2023 Bianchini
Project Documents
We were invited to give a talk at the Workshop on Leveraging Models for Contact-Rich Manipulation at the International Conference on Intelligent Robots and Systems (IROS) 2023 in Detroit, MI. I presented our progress on a contact-implicit robot controller for performing manipulation tasks. The controller works in real time thanks to local models that still preserve contact-derived multimodality, injected with global insights from sampling hypothetical end effector locations.
Interested readers can refer to our paper (on OpenReview) for all of the details. More information on the workshop can be found here.
Video 1: My presentation at the IROS 2023 workshop.
Video 2: Accompanying video to the presentation. Note the presentation includes this video and is a better guide to the experiment and methods, but both are uploaded to YouTube for ease of viewing.
Workshop paper abstract
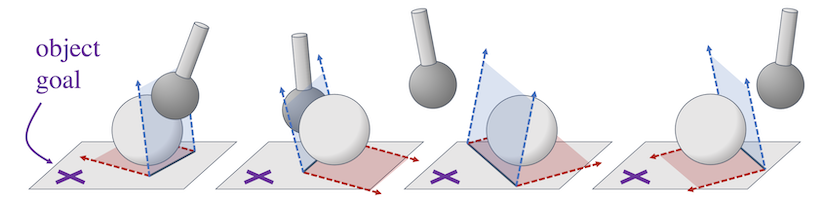
For robotic systems to be useful in everyday lives, they need to perform dexterous manipulation tasks in messy human environments. Enumerating all the possible physical interactions a robot can make with its environment and other objects is intractable, necessitating ways for robots to resolve how to perform tasks online, and in real time. However, on-the-fly globally optimal control is infeasible due to the high required computational load. Workarounds that preempt the computational cost by training or computing in advance lack the necessary ability to recover when real events are not foreseen by previous data or offline plans. Recent advances in model predictive control (MPC) leverage significant model simplification but demonstrate contact-implicit controllers capable of real time rates. These local model-based controllers require extra assistance for even simple manipulation tasks. We demonstrate using parallel local model-based control methods, ultimately making hybrid decisions at two levels: a contact- implicit locally optimal controller, wrapped by a layer which considers the controller’s performance from a sampling of end effector configurations. Our hierarchical controller is shown to perform simulated rolling tasks with a sphere and a jack at rates with expected real-time capability.
Citation
@inproceedings{venkatesh2023sampling,
title={Sampling-Based Model Predictive Control for Contact-Rich Manipulation},
author={Venkatesh*, Sharanya and Bianchini*, Bibit and Aydinoglu, Alp and Posa, Michael},
booktitle={IROS 2023 Workshop on Leveraging Models for Contact-Rich Manipulation},
year={2023}
}