BIANCHINI-LOVE ENGINEERING ELECTRICAL AND MECHANICAL DESIGN



Welcome to Bianchini-Love Engineering (BLE), the website of Bibit Bianchini and Henry Love! On this website, you will find both of our portfolios, including projects we’ve each done separately (labeled as LOVE and BIANCHINI) as well as our collaborations (labeled as BIANCHINI-LOVE). While most of the projects here relate to our specific training in electrical (Henry) and mechanical (Bibit) engineering, we document other kinds of projects here too, such as music, art, and this website itself. We continually update this site with new content and features, so be sure to check often for updates! For more information about the creators, please visit the About page.
Featured:
Bianchini
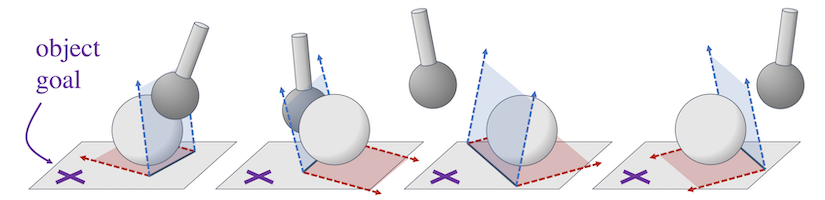
Sampling-Based MPC for Contact-Rich Manipulation
Updated: Mar 27, 2024
We were invited to give a talk at the Workshop on Leveraging Models for Contact-Rich Manipulation at the International Conference on Intelligent Robots and Systems (IROS) 2023 in Detroit, MI. I presented our progress on a contact-implicit robot controller for performing manipulation tasks. The controller works in real time thanks to local models that still preserve contact-derived multimodality, injected with global insights from sampling hypothetical end effector locations.

Bianchini
Simultaneous Learning of Contact and Continuous Dynamics
Updated: Mar 29, 2024
We published our work on data efficient model building through contact in a paper at the Conference on Robot Learning (CoRL) 2023 in Atlanta, GA. My co-authors are recent Penn PhD graduate Mathew Halm and our advisor, Professor Michael Posa. Our project simultaneously built contact and continuous dynamics of novel, possibly multi-link objects by observing their dynamics through collision-rife trajectory data.

Bianchini-Love
Stained Glass Window
Updated: Jan 02, 2024
Our row house did not previously come with visible house numbers on display. We took advantage over the transom window above our front door to make a stained glass window that features our house number. This was a new process for both of us, and we were surprised by how beginner-friendly it was, requiring only a couple of new glass cutting hand tools and an upgrade to a heavy duty soldering gun.

Bianchini
Live ContactNets Demo with Franka Arm
Updated: Sep 26, 2022
At the International Conference on Robotics and Automation (ICRA) in 2022 in Philadelphia, we took advantage over the conference being in our neighborhood and performed live demonstrations of our ContactNets project. The demo featured a Franka Panda robotic arm tossing a test object onto a table, and learning the object's geometry just by observing its contact-rich trajectory. My collaborators are fellow Penn PhD student Mathew Halm, Penn masters student Kausik Sivakumar, and Penn faculty Michael Posa.