HOME / BIBIT
I'm Bibit Bianchini.
I'm a roboticist,
- a PhD student in UPenn's DAIR Lab and Kod*lab,
- a tinkerer,
- a born-and-raised Pittsburgher,
- a lover of the outdoors,
- a dog mom,
- a believer that robots can help people.
I am interested in data-efficient, dynamic robotic manipulation in
contact-rich settings. Specifically, I work on model predictive
control and building dynamics models of novel objects as quickly as
possible, with the aim of enabling robotic manipulation in the wild.
I believe in and work towards a future where robots are everyday
appliances.

I share this site with my partner, Henry. My individual projects are below, but you can also see Henry's work and our shared collaborations.
Bibit's Project Posts

Bianchini
Push Anything: Single- and Multi-Object Pushing from First Sight with Contact-Implicit MPC
Updated: Feb 18, 2026
This big collaboration in my lab was accepted to and will be presented at ICRA 2026 in Vienna. My co-authors are my PhD labmate Hien Bui; three Penn masters students Yufeiyang Gao, Haoran Yang, and Stephen Felix; two Penn undergrads Eric Cui and Sid Mody; my lab alum Brian Acosta; and our advisor, Michael Posa. In this large team, my role was as the primary mentor for and one of many individual contributors on the model-building procedure, the sampling strategy, incorporation with the sampling-based contact-implicit control strategy I previously published, and experimentation. The other aspect of the project crucially is C3+, the enormously faster local contact-implicit controller.

Bianchini
Vysics: Object Reconstruction Under Occlusion by Fusing Vision and Contact-Rich Physics
Updated: Aug 13, 2025
We published our project on building dynamics models from vision and contact-rich robot interaction at Robotics Science and Systems (RSS) 2025 in Los Angeles. My co-authors are Penn postdoc Minghan Zhu, our advisor Professor Michael Posa, and three other collaborators: Mengti Sun, Bowen Jiang, and Professor Camillo J Taylor. Our project presents Vysics, which is a vision-and-physics framework for a robot to build an expressive geometry and dynamics model of a single rigid body, using a seconds-long RGBD video and the robot's proprioception.

Bianchini
Approximating Global Contact-Implicit MPC via Sampling and Local Complementarity
Updated: Feb 18, 2026
Our project on approximating global contact-implicit model predictive control (CI-MPC) was accepted to Robotics and Automation Letters (RA-L), and I will present it at ICRA 2026 in Vienna. My co-authors are Penn masters graduate Sharanya Venkatesh, our advisor Professor Michael Posa, and two PhD alumni of our lab: Alp Aydinoglu and Will Yang. Our project presents a novel combination of local control and global sampling to achieve a real-time controller capable of complex, generalizable contact-rich tasks, including SE(3) and SE(2) object reconfiguration in a tabletop setting. Our experiments include a 3D jack for SE(3) goals and planar push T for SE(2) goals.

Bianchini
Franka FR3 Category 2 E-Stop
Updated: Aug 13, 2025
A Category 2 stop on the Franka Research 3 (FR3) 6-DoF robotic arm is the best way to stop the robot arm with the least risk of damage to the robot's hardware. The FR3 ships only with a Category 1 stop Emergency Stop Device, but Franka supports adding on additional safe inputs. I built a replacement Emergency Stop Device which incorporates both the original Category 1 stop as well as an additional Category 2 stop, so we can use the latter as our first line of defense when trying to stop the robot with least risk of robot damage.

Bianchini
Simultaneous Learning of Contact and Continuous Dynamics
Updated: Mar 29, 2024
We published our work on data efficient model building through contact in a paper at the Conference on Robot Learning (CoRL) 2023 in Atlanta, GA. My co-authors are recent Penn PhD graduate Mathew Halm and our advisor, Professor Michael Posa. Our project simultaneously built contact and continuous dynamics of novel, possibly multi-link objects by observing their dynamics through collision-rife trajectory data.
Bianchini
Sampling-Based MPC for Contact-Rich Manipulation
Updated: Mar 27, 2024
We were invited to give a talk at the Workshop on Leveraging Models for Contact-Rich Manipulation at the International Conference on Intelligent Robots and Systems (IROS) 2023 in Detroit, MI. I presented our progress on a contact-implicit robot controller for performing manipulation tasks. The controller works in real time thanks to local models that still preserve contact-derived multimodality, injected with global insights from sampling hypothetical end effector locations.

Bianchini
Live ContactNets Demo with Franka Arm
Updated: Sep 26, 2022
At the International Conference on Robotics and Automation (ICRA) in 2022 in Philadelphia, we took advantage over the conference being in our neighborhood and performed live demonstrations of our ContactNets project. The demo featured a Franka Panda robotic arm tossing a test object onto a table, and learning the object's geometry just by observing its contact-rich trajectory. My collaborators are fellow Penn PhD student Mathew Halm, Penn masters student Kausik Sivakumar, and Penn faculty Michael Posa.
Bianchini
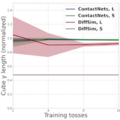
Avoiding Poor Generalizability of Differentiable Simulation
Updated: Sep 19, 2022
This post goes along with the presentation I gave at the workshop on Differentiable Physics for Robotics at the Robotics: Science and Systems (RSS) conference in 2022. I presented work on which I collaborated with fellow Penn PhD student, Mathew Halm, and Penn faculty Michael Posa.

Bianchini
Towards Human Haptic Gesture Interpretation for Robotic Systems
Updated: Sep 26, 2022
This post goes along with the paper I published at the International Conference on Intelligent Robots and Systems (IROS) in 2021 on research I conducted during my masters program. My co-authors are Stanford researcher, Prateek Verma, as well as Stanford faculty Ken Salisbury.
Bianchini
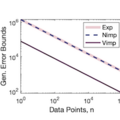
Generalization Bounded Implicit Learning of Nearly Discontinuous Functions
Updated: Sep 26, 2022
This post goes along with the paper I published at the 4th annual Learning for Dynamics and Control (L4DC) in 2022. My co-authors are fellow Penn PhD student, Mathew Halm, as well as Penn faculty Michael Posa and Nikolai Matni.

Bianchini
Robotic Manipulation Reading Group
Updated: Nov 22, 2024
This is the official paper archive of the Manipulation Reading Group started by members of Penn's DAIR Lab. The group meets weekly to go over papers devoted to robotic manipulation. Everyone is welcome. At the time of updating this post, our meetings occur in person, though feel free to reach out to me via email if you are not in the Philadelphia area and would like to request a virtual participation option.

Bianchini
Space Taco Corgi: Mechatronic Robot
Updated: Sep 26, 2022
For the notorious Stanford mechatronics course project, 3 of my classmates and I constructed a robot designed to play the 2019 ME218B challenge: the Great Pacific Garbage Patch. Designed to compete in 1-on-1 matches, autonomous robots were designed to commence when they received a start game signal, collect "garbage" (foam balls) throughout the game field, try to recycle as many as they could based on the garbage color, then throw the rest away into a landfill. All actions were autonomous, including localization, given that the robots were started in a random configuration every match.

Bianchini
Baseball Music Box
Updated: Apr 13, 2019
I wanted to build a unique engineering-focused display for a baseball in a way that would make people laugh. I used this idea for my project in Stanford's class ME203 Design and Manufacturing. My inspiration came from my desire to make a gift for a family friend whose was a Major League baseball player when he was younger, then became an engineer for the rest of his career. Thus, a baseball display with exposed engineering elements would be the perfect way for my friend to display a piece of his young and later life in her apartment.

Bianchini
Struct Surprise Toy Blocks
Updated: Feb 03, 2019
I built Struct with a team of 4 other members as part of the MIT class 2.00B. One of MIT's most popular classes, 2.00B Toy Product Design taught by Professor David Wallace and Dr. Maria Yang gives students an overview of design for entertainment purposes. Throughout the process, students develop ideas for new toys that serve clients in the community, and work in teams with local sponsors and experienced mentors on a themed toy design project. The spring 2015 theme was "Surprise"! We made a set of identical (looking) blocks that each behaved differently and surprisingly when interacting with it in a hands-on way.

Bianchini
Go-Karts
Updated: Feb 03, 2019
My dad and I originally got the idea of building go-karts when I was 4 years old. After two wooden boards with wheels sat for years in our playroom, we decided we wanted to finish the project when I was 9. The humble vision of a push-powered soapbox derby transformed into three customized, eye-catching electric go-karts with forward and reverse drive, horn, headlights, and personalized paint jobs for my and my sisters' unique personalities.

Bianchini
Industrial Design of a Home Solar Energy System
Updated: Feb 03, 2019
The MIT Development Lab (D-Lab) connects student teams with international community partners who work on projects to better developing communities. Through a D-Lab class, I partnered with Voya Sol, a company that develops home solar energy systems for rural Zimbabweans to build their own micro grids. I and my team focused on the industrial design of the appliance, including the user interface and features that would define how the appliance lives in the home.

Bianchini
Mass-Manufactured Nautical Yo-Yos
Updated: Feb 03, 2019
My team of 5 people designed a nautical-themed yo-yo, which we designed for mass manufacturing and of which we fabricated 50. We learned how to design for manufacture, to use injection molding and thermoforming machines, and to use MasterCAM to program CNC mills and lathes. I specifically did the design, tooling manufacturing, and production run of the ship steering wheel featured on both sides of the yo-yo.

Bianchini
Herreshoff Steam Engine
Updated: Aug 18, 2025
For my undergraduate thesis, I documented my process in manufacturing sand cast parts for a 1897 Herreshoff steam engine. The project got started through the Pappalardo Apprenticeship program I had joined the previous year. The final functional steam engine is part of a demonstration at an MIT Museum exhibit on Nathanael Greene Herreshoff that opened in fall 2018. I manufactured four of the engine components: the iron column, two iron gibs, and the bronze bearing crosshead.

Bianchini
Lamp
Updated: Feb 03, 2019
As a result of my learning how to weld and use new pieces of machinery, I built a steel, wall-mounted, cantilevered lamp that would fit the constraints of my bedroom. It functions as a simple lamp with a dimmer switch, but the unique design incorporates a slender, wall-mounted body that fits within the three-inch piece of wall between my bed's headboard and a stair railing. The 3-foot blackened steel arm is supported by a thin bicycle cable and can swing in a 180-degree arc from over the middle of my bed to over the stairwell in my room. The head of the lamp rotates to direct light.
Bianchini
Pentris Python Computer Game
Updated: Feb 03, 2019
I made this advanced version of Tetris as a project for 15.112 Fundamentals of Programming as a part of Carnegie Mellon University's precollege program. Using Python 2 and TkInter to produce the simple GUI, I made Pentris like Tetris, but where all pieces have 5 blocks in them instead of 4. Additional features include mirroring pieces, piece previews, hard drops, and high score tables.